
About Me
Hi there!
I am a second-year Research Master's Student at Carnegie Mellon University studying Mechanical Engineering, with a concentration in Robotics. I have a passion for robotic design, especially Robot Navigation! I am currently a part of CERLab, under Professor Kenji Shimada, where I am conducting research on autonomous welding and concrete printing robots. I graduated with a Bachelor's Degree in Mechanical Engineering from Rashtreeya Vidyalaya College of Engineering in Bangalore, India, in May of 2019.
Previously, a Software Project Developer for Robert Bosch, I've been a key contributer on a wide range of commercial vehicle lines and have extensive automotive sector expertise in power-trains for hybrid-electric vehicles in American and Asian commercial markets. I was responsible for developing, integrating and delivering software modules for Battery Management Systems (BMS) and Engine Control Units (ECU) and along the way acquired competencies in Agile methodologies, AUTOSAR standard practices and customer requirements engineering. It has taken many personal sacrifices to ensure I was meeting or exceeding all the requirements for the task at hand. As a result of this challenging, yet highly rewarding experience, I have gained broad automotive sector experience and an advanced proficiency in software integration and system-level validation of OEM requirements. I have learned to value and embrace design approaches that combine key concepts of system behavior and analysis, software adaptability and learning.
With a background in Automotive Software Development and Robotics, I am able to apply methods of design thinking to all my projects, professional or personal. My design process involves automation and modularity which helps me delve into my work with the goal of developing transformative products that improve performance and eliminate redundancy. A holistic perspective of one's products and processes are critical to success creation in any product life-cycle, a philosophy I try to imbue in my approach to research at Carnegie Mellon.
My coursework and research experience has given me a glimpse at a variety of disciplines and subjects; I have found a great curiosity and passion for robotics, perception, navigation, dynamic controls and simulation, and other deeply technical fields. It’s my goal to learn as much as I can about these fields through my studies and hands-on work experience. I have pushed hard to work with like-minded people and creators and this helps me broaden my horizons. I strive to be able to create quality engineering pipelines, approaching complex problems with a technical approach, and understand the most optimal method to execute them. I have a constant thirst to learn new things and am enthusiastic about meeting and working with new people. Having worked in the industry for a short while, I am keen to resume my journey towards technical expertise.
Currently, I am working at the Computational Engineering and Robotics Lab at CMU, building a 3D concrete-printing and welding mobile robot capable of full autonomy to help reduce the cost of manufacturing and production through automation for Shimizu. I have a deep interest in the navigation stack and my research has been directed towards understanding and augmenting the robot navigation stack using learning. I have developed a comprehensive understanding of autonomous robotic systems through my course-work, and my course-projects at CMU have served as a platform to explore ongoing research, and implement and experiment with state-of-the-art methodologies within the domain.
Expecting to graduate in May, 2023, I am looking to be an impactful contributor within my niche of expertise. I have a deep passion for robotic design as an industrious Roboticsist and experienced Software Engineer and I am seeking an opportunity to collaborate and create within this disruptive space.
Software
• ROS
• Move-It
• Gazebo
• RasPi
• AWS
• MATLAB
• Simulink
• Webots
• SolidWorks
• ANSYS
• GCP
Languages
• C++
• Python
• C
• MATLAB Programming
Libraries
• NumPy
• SciPy
• PyTorch
• TensorFlow
• Pandas
• Scikit
• OpenCV
• OpenGL
• Pangolin
• TBB
• Eigen
Robotics
• Mobile Robots
• Autonomous Robots
• Navigation
• Path Planning
• SLAM
• Motion Planning
• Motion Control

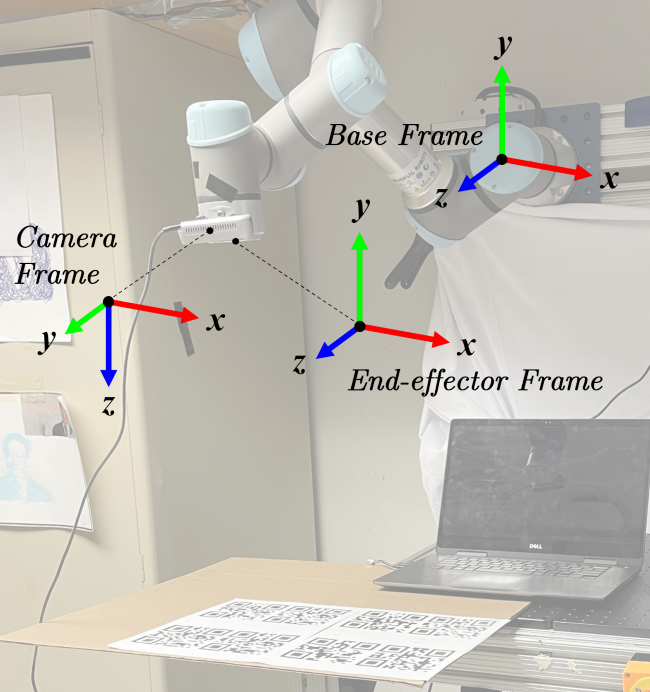
Eye-In-Hand Calibration using EKF
The goal of this project is to automatically calibrate the positioning of a UR5 robotic arm,
with a camera mounted on the end-effector using a SLAM-based method.
An EKF based measurement model is deployed to effectively localize the camera and compute the camera to end-effector transformation.
Exploring Video Frame Interpolation using Deep Learning
Adapted an IFRNet neural architecture for video frame interpolation using optical flow techniques and contemporary deep learning structures such as VAE, GAN and VAN to improve video compression and reconstruction quality.
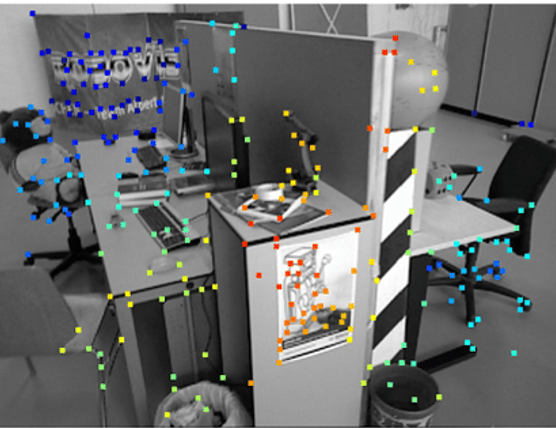
Monocular SLAM in C++
Implemented a small-scale monocular SLAM system for static environments operating on the T.U. Munich-RGBD dataset. Built and deployed using C++ tools and libraries for feature detection, tracking, camera pose estimation and mapping

Automotive Sprinter Control in Webots
This project looks at engineering the Control System of an simulated autonomous vehicle as it traverses CMU's historic Buggy track using Webots.

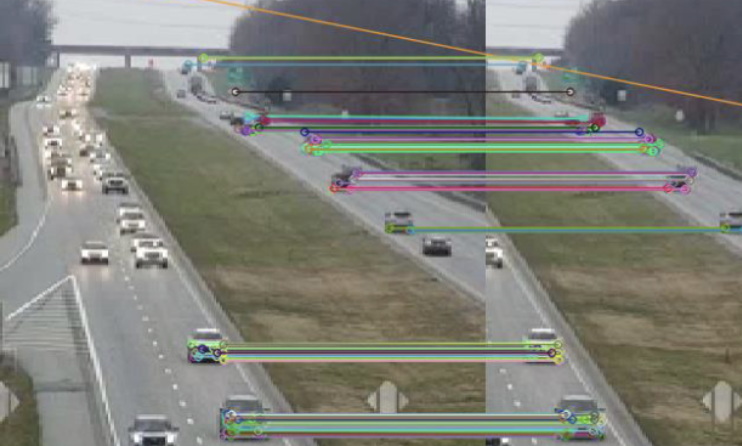
Traffic Density Estimation using ORB and YOLO (Brute Force)
This projects attempts to build a seamless tool using Computer Vision and Image Processing to accurately estimate the traffic density by augmenting the existing solutions at minimum added cost.
-
Email
aditya.ramakrishnan@icloud.com -
Social